
如果你家裏養有魚,並想找到一種自動化餵食的方法,這個項目可能會對你有所啓發。

在這個教程中,作者將展示如何制作自己的基于Arduino的自動餵魚器,讓小魚不再餓肚子。

自動餵魚器的工作原理非常簡單,我們將飼養裝置連接到步進電機的軸上,當超聲波傳感器檢測到障礙物時,步進電機就會啓動,因此飼養裝置會移動並將食物顆粒投放到魚缸裏。

你也可以通過修改程序來設置各種參數,如應投放的食物數量等等。
這個裝置幾乎可以安裝在任何類型的魚缸上,飼養裝置的尺寸也可以根據需要擴大。
說了這麽多,讓我們開始看看制作這個飼養器需要哪些材料。
材料准備步進電機Arduino Uno/nano步進電機驅動器超聲波距離傳感器跳線玻璃瓶(你也可以使用魚缸)束線帶用于放置玻璃瓶的小盒子(如果你使用魚缸則不需要)3D打印機和PLA細絲Arduino IDE第1步:3D打印

將用于分發食物的零件都用3D打印制作,這樣可以避免由于溢出而造成浪費。
你可以使用下面給出的STL文件,注意我不會使用任何墊片或支撐來打印這些零件。(文末打包下載)


PLA細絲顔色可由你選擇,在我看來,這種顔色看起來不錯。你可以參考上一步的圖片,看看我遵循的打印設置。
這個設計是爲28BYJ-48步進電機制作的,除非你對最終設計做一些修改,否則它不能直接應用在其他電機上。
在3D打印出零件後,我們就可以開始布線並制作硬件電路了。
第2步:電路圖和程序
我們可以將電路分爲兩部分,第一部分是步進電機,另一部分是超聲波傳感器。
將步進電機連接到驅動器,然後根據下面的說明將驅動器引腳連接到Arduino:
In1 接 D2In2 接 D3In3 接 D4In4 接 D5+和-引腳分別連接到Uno板的5V和GND引腳。
超聲波傳感器有4個引腳,Vcc、Gnd、Trig和Echo,按如下方式連接:
Vcc接3.3V, Gnd接GndTrig接D9, Echo接D10
到此電路部分就完成了,現在通過USB線將Arduino連接到電腦上。
打開IDE,使用下面的程序,確保選擇正確的端口和板卡型號,然後點擊上傳按鈕。完成後,我們的硬件電路部分就全部完成,可以繼續下一步了。(代碼也可以在文末打包下載)
 第3步:添加步進電機飼養裝置
第3步:添加步進電機飼養裝置這一步非常簡單,但也是最重要的一步。首先在步進電機上塗一些膠水,然後放上3D打印的飼養裝置底座,用力按壓,保持一段時間。


當膠水完全幹燥後,我們就可以添加頂部帶有凹槽的主體部件。在連接處也許需要塗上一點熱熔膠,以確保足夠的強度。


在這裏,你可以把底座安裝在與步進電機接線處相反的區域,這將有助于之後把飼養器放進魚缸時的操作。
還有一點是要確保底座和旋轉部分之間的間隙非常小,否則可能會導致食物漏出來。
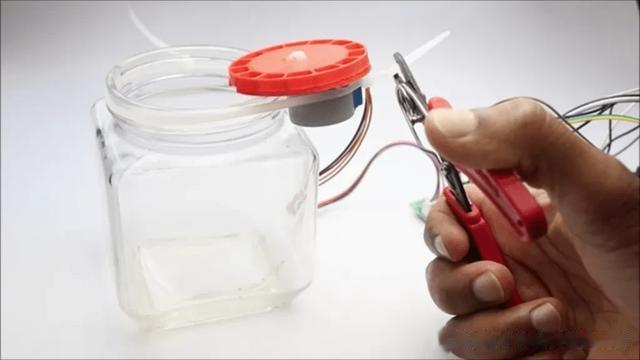
第4步:總裝爲了讓飼養器看起來更美觀,我們使用一個3D打印的框架來固定超聲波傳感器。它是一種壓入式的設計,我把它連接到HC-SR04上,你可以看到現在看起來還不錯。

爲了將步進電機安裝到魚缸上,我將使用束線帶。因爲這個魚缸是圓形的,所以這種方式最合適。如果你使用的是方形的,我建議使用夾子式的固定架。
使用足夠多的束線帶固定,並剪去多余的部分。對于傳感器,我使用了熱熔膠進行固定。

不同的材料需要不同的固定方式,因此要靈活選擇,選擇最適合你需求的方式。
第5步:如何使用這款飼養器的使用方式不局限于某一種,由于它是可編程的,你可以用許多方式使用它,不過現在來看看我的使用方法。
我會在每個需要分發的凹槽裏放入一些米粒, 你也可以放入魚食。在所有的凹槽都裝滿食物後,確保超聲波傳感器前面沒有障礙物。
將Arduino連接到電源,現在當你手擋在傳感器前面時,食物就會落入水中,這樣魚兒就可以進食了!
這就是這個項目的全部內容了,你可以根據自己的需求對它進行改裝。
原文地址:https://www.instructables.com/How-to-Make-Arduino-Powered-Fish-Feeder/
項目作者:CrazyScience
譯文首發于:DF創客社區 https://mc.dfrobot.com.cn/thread-318295-1-1.html 資料下載
轉載請注明來源信息
