

這周介紹的這個機器狗可以執行基本動作,比如行走、轉彎、站立、趴下和打招呼……

在項目中,作者使用了之前設計的基于Arduino Nano的多伺服電機控制板。該板可以控制多達9個伺服電機,以及通過藍牙模塊進行無線伺服電機控制。此外,通過板上的可調電壓模塊可以控制不同類型的伺服電機。
步驟1:基于Arduino Nano的多伺服電機控制板
作者設計的板子可以控制多達9個伺服電機,還可以使用安裝在其上的藍牙模塊無線控制電機。
如果我們仔細看一下設計的電路圖,板上有一個可調電壓調節器模塊。轉換模塊使得可以根據伺服電機的功率需求獨立于Arduino Nano調節電壓。所需的電壓水平可以通過模塊上的電位器進行調整。
在伺服電機電源線上增加了一個肖特基二極管,它的功能是通過幫助控制電源線波動、電壓反流和電磁噪聲來提高電路的可靠性。作者還在電路中添加了兩個電容器。伺服電機在突然移動時可能需要大量電流,電容器可以用來滿足這種突然的電力需求,穩定電源,並幫助減少電源波動。

作者還在每個伺服電機信號腿上添加了一個電阻。電阻器在電路中充當保護電阻。電阻器通過以某種方式限制來自微控制器的信號來保護伺服電機的信號腿免受過電流和有害電壓的影響。
由于伺服電機和Arduino Nano通常使用電路的電源線,因此添加了一個跳線來在編程微控制器時斷開連接到伺服電機的電源線。對于藍牙模塊也是如此,由于TX和RX引腳在編程期間“忙碌”,因此在藍牙電源輸入處添加了一個跳線,以防止通信錯誤,使得在編程期間可以切斷藍牙電源。最後,一個電容器被添加到Arduino Nano VIN供電輸入以減少電源波動。
大家可以訪問鏈接以轉到項目頁面並下載設計文件:https://www.pcbway.com/project/shareproject/Explore_using_a_customized_Arduino_Nano_based_board_to_wirelessly_control_up_to_078e9d15.html
步驟2:機器狗3D部件組裝
總共有4條腿,所以你需要打印4套腿部件。部件非常容易組裝,可以用锉刀或砂紙把關節弄平。作者使用了锉刀和砂紙,這使得部件的關節移動更自由,也減輕了伺服的負荷,使其更容易移動。


作者用快幹膠將伺服電機臂固定到腿上,用螺絲弄起來很困難,主要是沒有合適長度的螺絲 = =
塗膠時不要溢出!將少量膠水塗在3D部件上,將冷凍噴霧塗在伺服臂上,然後將其裝入臂槽中。10秒的幹燥時間就足夠了。另外作者還塗了非常少量的膠水,以防止3D部件連接銷從孔中脫落。


相關3D打印文件可以在文末下載。
步驟3:在機身上固定伺服電機

機器狗中使用了9個MG90S伺服電機。MG90S微型伺服電機是SG90微型伺服電機的高級版本,是最廣泛使用的伺服電機。伺服電機是低循環(快速)、高扭矩電機。因此,它們經常在機器人應用中使用。遙控車、遙控飛機、機器人臂、遙控船等也有,它有許多使用領域。
型號:Tower Pro MG90S伺服電機工作電壓:4.8V - 6V重量13.4克尺寸:22.8x12.2x28.5mm(大約)無負載速度:0.1秒/60度(4.8V),0.08秒/60度(6V)扭矩:1.8 kg.cm(4.8V),2.2 kg.cm(6V)角度範圍:0° - 180°(標准)金屬齒輪將舵機按照視頻或圖片中所示裝到機器狗身上。作者這邊使用了舵機附帶的螺絲將舵機固定在機身上。
步驟4:伺服電機的初始位置

在將伺服固定到機身後,需要在連接腿部之前上傳代碼將所有伺服移動到初始位置。作者已經標記了伺服引腳,好可以知道伺服連接到哪個Arduino Nano數字輸入引腳。重要的是,在將板子連接到USB口之前,記得拔下SERVO_PWR(伺服電機電源)和BLE_PWR(藍牙電源)跳線。否則,如果伺服電機連接到板上,它們可能會過電流並損壞USB口,藍牙模塊在上傳代碼期間可能會導致通信問題。
圖片顯示了哪個伺服連接到哪條腿以及它們的初始位置。
Leg1F = 80度Leg1B = 100度Leg2F = 100度Leg2B = 80度Leg3F = 80度Leg3B = 100度Leg4F = 100度Leg4B = 80度Headservo = 90度相關代碼可以在文末下載。
步驟5:將腿安裝到伺服上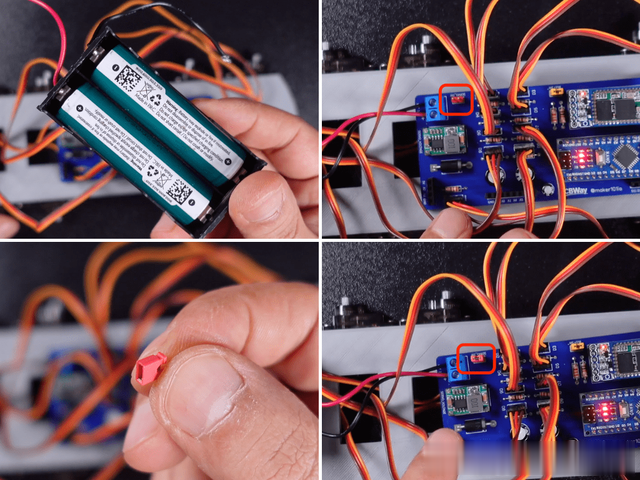

上傳代碼後,將電池連接到電路(使用了2x 3.7V 18650锂離子電池)。然後連接跳線SERVO_PWR,伺服電機應該會回到初始位置。


如圖像或視頻所示,將腿的兩端折疊起來。將身體側放並以90度將腿的兩端連接到伺服電機上,它看起來像一個倒三角形。在安裝腿時,電路中仍然有電,這是爲了避免伺服位置的移動。
步驟6:機器狗頭部組裝
組裝完腿後,用紮帶收集伺服電機線,將電池放在身體的下部,並固定好。現在開始安裝機器狗的頭!

建議在打印前將3D頭部部分縮放至106%,這樣HC-SR04超聲波距離傳感器和伺服臂更容易安裝。

再次使用快幹膠將雙頭伺服臂安裝到頭部。然後將頭部放在身體上的伺服上,並用伺服電機臂螺絲固定頭部。

HC-SR04超聲波距離傳感器目前沒有功能。然而,在未來的日子裏,作者將更新機器狗、項目代碼和移動應用程序,所以在板上留下了足夠的輸入輸出引腳以供額外的傳感器使用。

HC-SR04超聲波距離傳感器目前沒有功能。然而,在未來的日子裏,作者將更新機器人、項目代碼和移動應用程序,所以在板上留下了足夠的輸入輸出引腳以供額外的傳感器使用。
相關3D打印文件可以在文末下載。
步驟7:源代碼和移動應用程序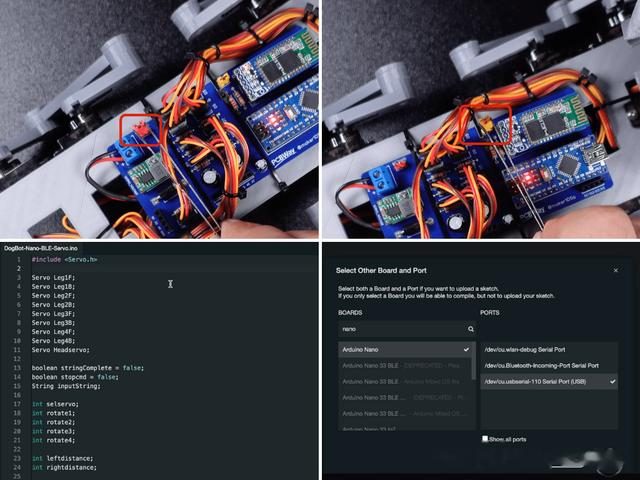

下載應用程序源代碼並用Arduino IDE打開,(重要)在將板子連接到USB口之前再次拔下SERVO_PWR和BLE_PWR跳線,然後連接板並上傳代碼。
轉到MIT App Inventor,這是一個免費平台,你可以輕松創建移動應用程序。包括共享的(.aia)應用程序項目文件。你也可以對UI和後端進行更改,但這需要一點技術。
然後從構建選項創建Android App(.apk)文件,下載和代碼掃描選項都可用于獲取應用安裝文件。
App Inventor aia擴展名在這裏不受支持,你可以從這裏下載文件 - https://www.pcbway.com/project/shareproject/Explore_using_a_customized_Arduino_Nano_based_board.html
相關代碼可以文末打包下載。
步驟8:啓動應用程序並操控機器狗
上傳代碼並安裝應用程序後,重新連接板子的電源跳線。打開Android設備的藍牙連接並在列表中與名爲HC-06x的藍牙模塊配對。在配對過程中可能會要求輸入密碼,通常默認密碼是1234(或0000)。然後打開機器狗應用程序,列出藍牙設備,在列表中找到藍牙模塊並選擇它。

如果連接成功,應用程序將切換到控制界面。
現在你就可以來操控你的機器狗了!

原文地址:https://www.instructables.com/Explore-Simple-3D-Dog-Robot-and-Multiple-Servo-Mot/
項目作者:MertArduino
譯文首發于:DF創客社區 https://mc.dfrobot.com.cn/thread-318190-1-1.html
轉載請注明來源信息
